Robot Platforms · Motor Modules · Custom Development
Robot platforms and motion control products supplier
nexmotion - Robo supplies humanoid robots, wheeled bipedal and wheeled-legged platforms, joint actuator modules, BLDC/servo motors and motor development support for R&D, display, inspection, transport and automation projects.
- 24h
- Response
- 4
- Robot Platforms
- ODM
- Motor Customization

Humanoid Robot Platform
Joint Modules · Motion Control · Full Body Integration
Project Support
Help buyers quickly identify a feasible robotics project direction
For complete robot purchases, motor modules, custom motor development and automation integration, we first review the application, load, speed, space, power source, control interface and quantity, then suggest a practical product and delivery path.
Product Matrix
Common supply scope for robotics projects
Current Business Scope
Complete robot sales focus on T170A, T140, TITA and D1. Motor services cover robot joint modules, wheel drives, motor development and production introduction. Solutions focus on inspection, transport, R&D education, service display and automation integration.
Complete Robot Sales
T170A and T140 humanoid robots, the TITA wheeled bipedal platform and the D1 modular wheeled-legged robot for demos, prototypes and batch projects.
- Robot selection and project matching
- End-effectors and software interfaces
- Pre-sales demo and deployment advice
Robot Motor Modules
Joint actuator modules, wheel drives, BLDC motors, servo motors, encoders, gearboxes and drive control board combinations.
- Torque, speed and power selection
- Hall sensor or encoder feedback options
- Structure, harness and interface customization
Motor Development and Production
Motor solution development, prototype sampling, pilot production and mass-production support for robots, automation equipment and mobile platforms.
- BLDC, servo and wheel motor development
- Winding, magnetic, structure and thermal design
- Performance testing and production QC
Robotics Solutions
Product combinations, motion control support and integration advice for warehousing, inspection, education, reception, handling and light industrial scenarios.
- Application requirement breakdown
- Prototype testing and production introduction
- Cost, lead time and maintenance planning

TITA Wheeled Bipedal Robot
A quasi-direct drive wheeled bipedal platform that combines wheeled mobility with legged terrain adaptability for inspection, transport, data collection and research.
- ROS 2 and open interfaces
- 8 DoF, max speed 3m/s
- 10kg moving payload

D1 Modular Wheeled-Legged Robot
A modular embodied robot platform with whole-machine coupling, multi-robot docking and multiple motion configurations for R&D, patrol, delivery, rescue and mobile filming.
- Dual-robot quick coupling ≤5s
- Four-wheeled-legged speed up to 3.2m/s
- Crawling payload ≥100kg
Model Comparison
Select the robot platform by task and project stage
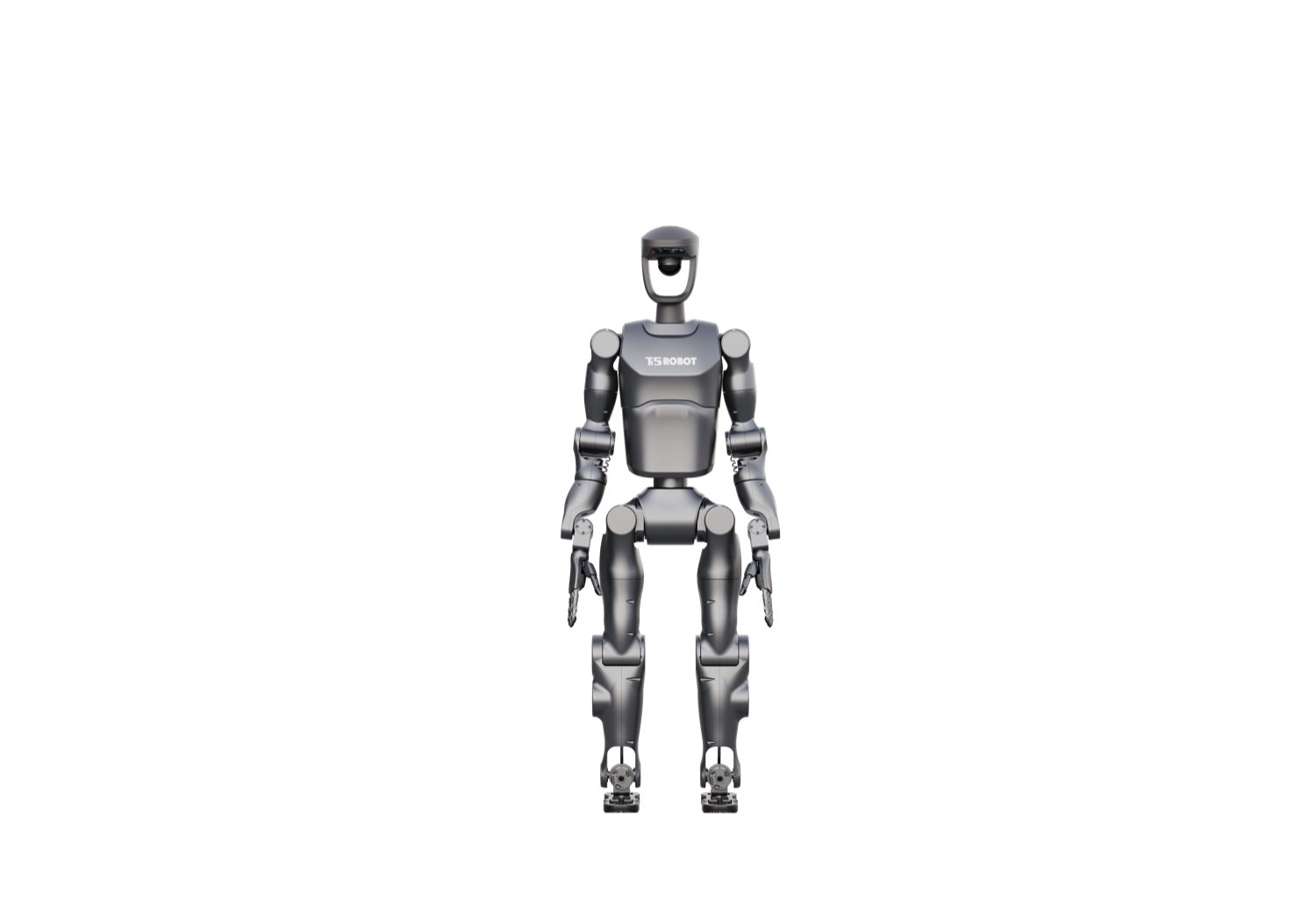
Humanoid Robot
T170A Humanoid Robot
For demonstrations, R&D, service scenarios and complex motion validation, with high-compute control, binocular vision, long-range lidar and high-torque leg joints.
- Height/Weight
- 170cm / approx. 50kg
- DoF
- 44 DOF
- Compute
- Jetson AGX Orin 64GB
- Payload
- 5kg single hand
Compact Humanoid
T140 Humanoid Robot
A lighter humanoid platform for education, research, interactive display and service scenarios with limited space. Supports binocular vision and 7-DoF arms.
- Height/Weight
- 140cm / approx. 38kg
- DoF
- 42 DOF
- Compute
- Jetson AGX Orin 64GB
- Payload
- 2kg single hand
Wheeled Bipedal
TITA Wheeled Bipedal Robot
For inspection, transport, data collection, scanning, mapping and secondary development, combining wheeled speed, legged adaptability, open APIs and modular expansion.
- Size
- 510 x 590 x 490mm
- Speed/Payload
- 3m/s / 10kg moving
- Compute/API
- 100 TOPS / ROS 2
- Runtime
- Dual batteries, approx. 1h each
Modular Wheeled-Legged
D1 Modular Wheeled-Legged Robot
A wheeled-legged robot with whole-machine modularity, expandable from wheeled-legged and legged motion to dual-robot coupling for complex mobile payload and research scenarios.
- Size
- 750 x 493 x 643mm
- Weight/DoF
- 48.5kg / 16 DOF
- Processor
- Jetson Orin NX 8GB
- Runtime/Speed
- Approx. 2h / 3.2m/s
Selection Note
For humanoid display, interaction and dual-arm motion, start with T170A or T140. For outdoor inspection, mobile transport, mapping and open development, start with TITA. For multi-robot coupling, high payload and modular research platforms, start with D1. Final selection still depends on payload, terrain, runtime, sensors, control interface and budget.
Modular Wheeled-Legged Platform
D1: an embodied mobile platform for quick coupling and multi-configuration collaboration
D1 combines the agility of wheeled robots with the terrain adaptability of legged robots. It supports wheeled-legged, legged and mixed coupling configurations. Its modular structure and open interfaces can integrate vision modules, communication modules, AI hosts, edge processors and multiple sensors.
≤5sdual-robot quick coupling
≥25kmtwo-wheeled unloaded range
≥100kgcrawling posture payload
Ubuntu 22.04 / ROS 2secondary development

New Product Line
TITA: a wheeled bipedal platform for inspection, transport and robotics R&D
TITA uses quasi-direct drive joints and hub motor drive technology. It supports configuration directions such as two-wheeled self-balancing, wheeled bipedal, bipedal, quadruped and wheeled quadruped. It can integrate vision modules, communication modules, AI hosts, edge processors and sensors for smart parks, mines, substations, nuclear power stations and complex industrial environments.
Jetson Orin NX 16GBprocessor
100 TOPSAI performance
43.2Vnormal voltage
-10℃ ~ 45℃operating range
Solutions
Match robot and motion control solutions by application
Humanoid Robot Scenario
Confirm practical solutions from complete platforms to joint actuators
Factory, warehousing, inspection and R&D projects usually care about complete robot capability, joint module reliability, control interfaces, prototype testing and future production. We review the scenario and key parameters before suggesting whether to source a complete robot, module or custom motor.
Scenario
Recommended Direction
Key Confirmation
Collaborative Robot Arm
Joint modules, servo drives, encoders and end-effectors
Payload, reach, repeatability and safety level
AMR/AGV Mobile Robot
Wheel drive motors, drivers, chassis control and navigation interfaces
Payload, speed, slope, runtime and floor condition
Motor Development and Production
BLDC, servo and wheel motors, joint actuators, motor drives and test plans
Voltage, torque, speed, duty cycle, size, lifetime, noise and annual volume
Service/Inspection Robot
Robot platform, pan-tilt unit, lifting module and low-noise motors
Working time, noise, appearance and sensor integration
Education and R&D Platform
Development kits, compact servo modules, control boards and SDKs
Open interfaces, documentation, budget and sample schedule
Inspection/Transport Robot
TITA wheeled bipedal platform, sensors, edge computing and ROS 2 interfaces
Terrain, slope, payload, runtime, communication method and secondary development needs
High-Payload Modular Platform
D1 modular wheeled-legged robot, coupling mechanism, perception modules and arm expansion
Payload weight, coupling mode, stairs/slope, range and development interfaces
Delivery Process
From requirements to prototype, then to production
Requirement Review
Confirm application, load, speed, torque, space, power source, control method, quantity and target cost.
Solution Selection
Provide product direction, key risks, quotable items and parameters that need testing confirmation.
Prototype Testing
Arrange samples, drawings, datasheets, video tests or remote meetings to verify performance boundaries.
Production Introduction
Confirm packaging, inspection, lead time, after-sales support and version control for batch projects.
Motor Production
Build a stable production flow around winding, magnets, bearings, balancing, temperature rise, noise and final testing.
Service Capabilities
Project support from selection to delivery
Product Selection and Review
Translate load, speed, torque, voltage, space and cost targets into suitable robot, motor or module options.
Motor and Module Customization
Support BLDC motors, servo motors, wheel drives, joint modules, control interfaces, wiring and structural adjustments.
Prototype and Testing Support
Provide samples, drawings, datasheets, test videos and remote discussions to confirm performance boundaries.
Robot Integration Advice
Support application and configuration discussions for humanoid robots, wheeled bipeds, wheeled-legged platforms and mobile robots.
Quotation and Batch Delivery
Clarify MOQ, sample cost, lead time, customization items, packaging, inspection and production version control.
Bilingual Technical Communication
Prepare product information, specification notes, requirement summaries and presales technical replies for global buyers.
Project Inquiry
Send your robotics requirement and we will suggest a feasible direction first
For a faster reply, please share the application, voltage, torque or load, speed, space limit, control method, sample schedule and estimated quantity. Your inquiry will be sent to our business email for project follow-up.
Shanghai TST Trading Co., Ltd