Requirement Review
Voltage, torque, speed, duty cycle, load type, space envelope, thermal condition, target lifetime and annual quantity.
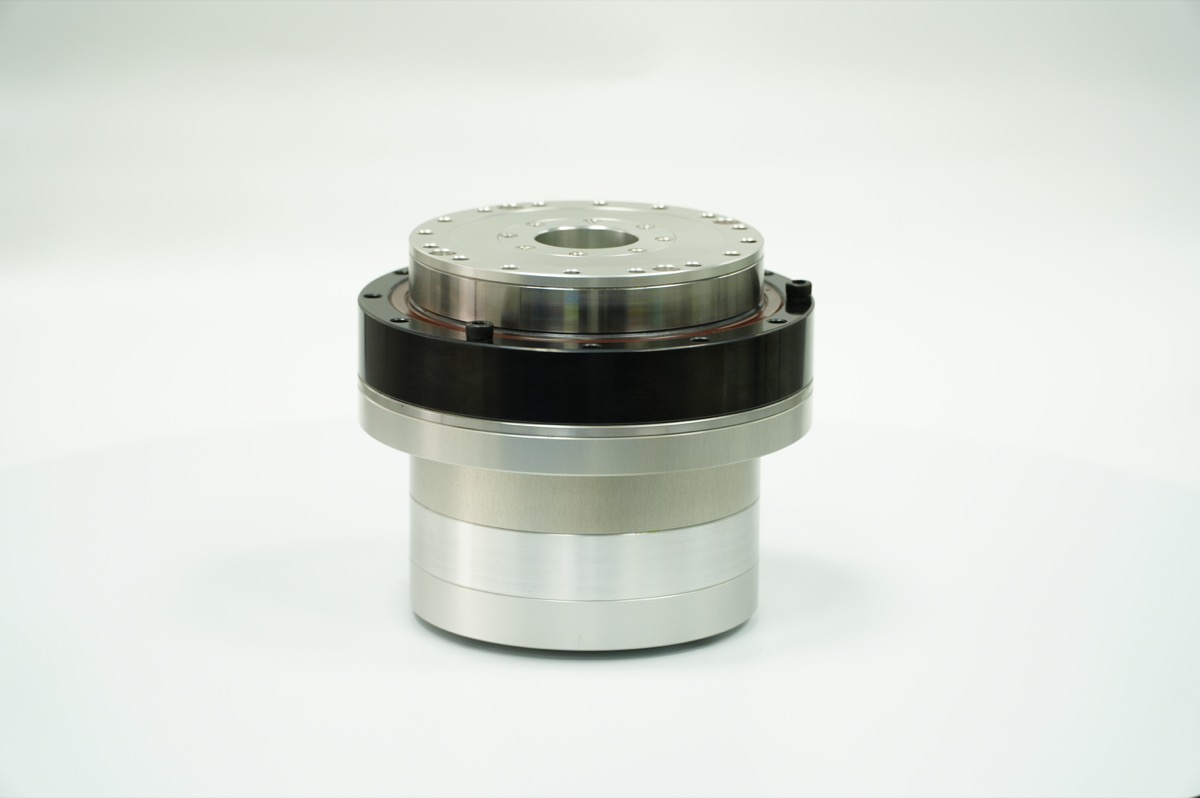
Robot Joint Actuator
Support for BLDC motors, servo motors, wheel drives, robot joint actuators, encoders, gearboxes, drivers, testing and production introduction.
Development Scope
Voltage, torque, speed, duty cycle, load type, space envelope, thermal condition, target lifetime and annual quantity.
Winding direction, magnetic circuit, shaft/flange structure, encoder or Hall feedback, driver matching and temperature rise validation.
Inspection plans for winding, magnets, bearings, rotor balance, noise, vibration, driver pairing and outgoing performance tests.
FAQ
Application, voltage, rated torque, peak torque, speed, duty cycle, size, cooling condition, control method, quantity and cost target.
Yes. The project can be discussed as motor only, motor plus gearbox, or motor plus driver/control board depending on the application.
Confirm thermal margin, starting behavior, driver current, connector and wire gauge, noise target, bearing load and final test items before mass production.
Send torque, speed, voltage and quantity. We will help identify the feasible motor direction.