机器人整机 · 电机模组 · 定制开发
机器人平台与运动控制产品供应商
为研发、展示、巡检、运输和自动化项目提供人形机器人、轮式双足/轮足平台、关节模组、BLDC/伺服电机以及电机开发生产支持。
- 24h
- 需求响应
- 4款
- 机器人平台
- ODM
- 电机定制

Humanoid Robot Platform
Joint Modules · Motion Control · Full Body Integration
项目支持
让客户快速判断机器人项目的可行方向
围绕整机采购、电机模组、电机开发和自动化集成需求,先确认应用场景、负载、速度、空间、电源、控制接口和数量,再给出适合的产品方向与交付建议。
产品矩阵
机器人项目常用供应范围
当前重点业务范围
整机销售以 T170A、T140、TITA、D1 为主;电机业务覆盖机器人关节模组、轮边/轮毂驱动、电机开发及量产导入;解决方案围绕巡检、运输、研发教学、服务展示和自动化集成。
机器人整机销售
覆盖 T170A、T140 人形机器人、TITA 轮式双足平台和 D1 模块化轮足机器人,支持演示、样机和批量项目采购。
- 整机选型与项目匹配
- 末端执行器与软件接口
- 售前演示与部署建议
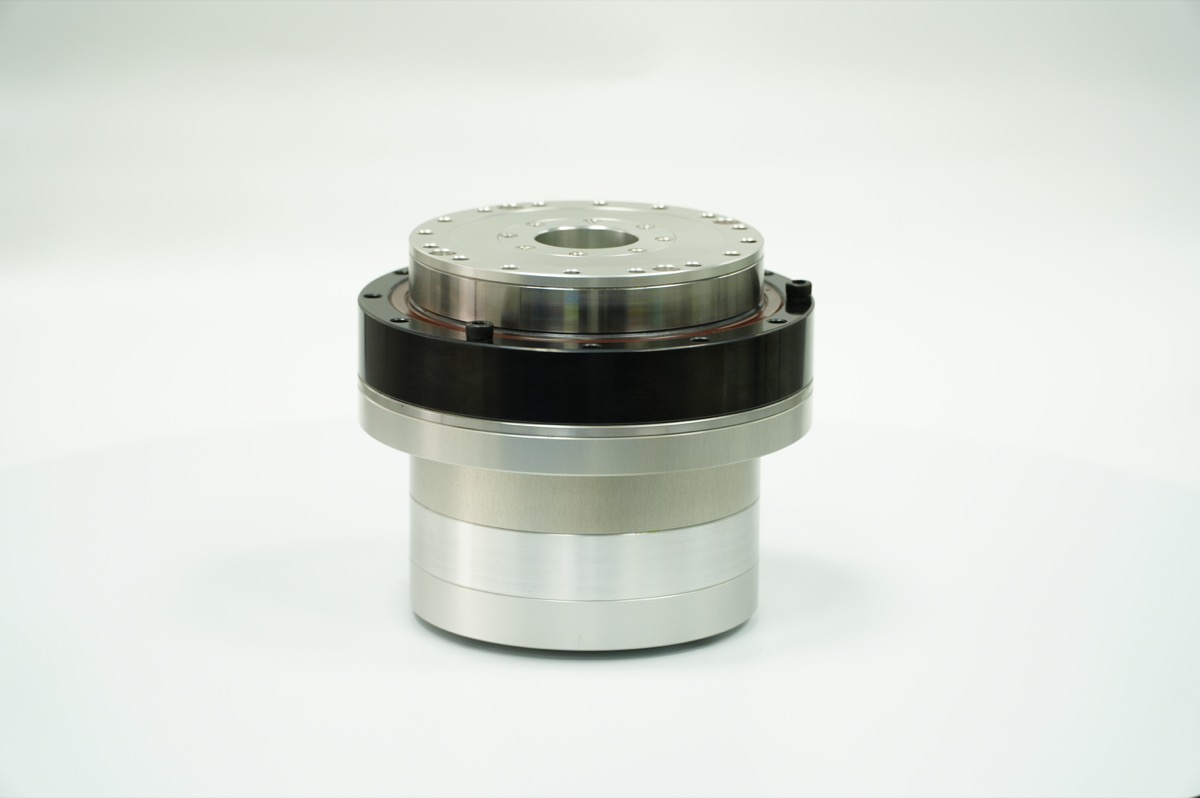
机器人电机模组
关节模组、轮毂/轮边驱动、BLDC 电机、伺服电机、编码器、减速器和驱动控制板组合方案。
- 扭矩、速度、功率选型
- Hall/编码器反馈方案
- 结构、线束、接口定制
电机开发及生产
面向机器人、自动化设备和移动平台提供电机方案开发、样机打样、小批量试产和量产导入支持。
- BLDC/伺服/轮毂电机开发
- 绕组、磁路、结构与热设计
- 性能测试与量产质检
机器人解决方案
面向仓储、检测、教育、迎宾、搬运和轻量工业场景,提供产品组合、运动控制和落地集成建议。
- 场景需求拆解
- 样机测试与量产导入
- 成本、交期、维护方案

TITA 轮式双足机器人
准直驱轮式双足平台,兼具轮式移动速度和腿式地形适应能力,适合巡检、运输、数据采集和研发教学。
- ROS 2 与开放接口
- 8 自由度,最高 3m/s
- 移动载荷 10kg

D1 模块化轮足机器人
支持整机模组化、双机闪拼和多形态联合协作,适合科研开发、安防巡检、短途配送、应急救援和移动拍摄。
- 双机闪拼 ≤5s
- 四轮足最高 3.2m/s
- 匍匐姿态负载 ≥100kg
型号对比
按任务和项目阶段选择机器人平台
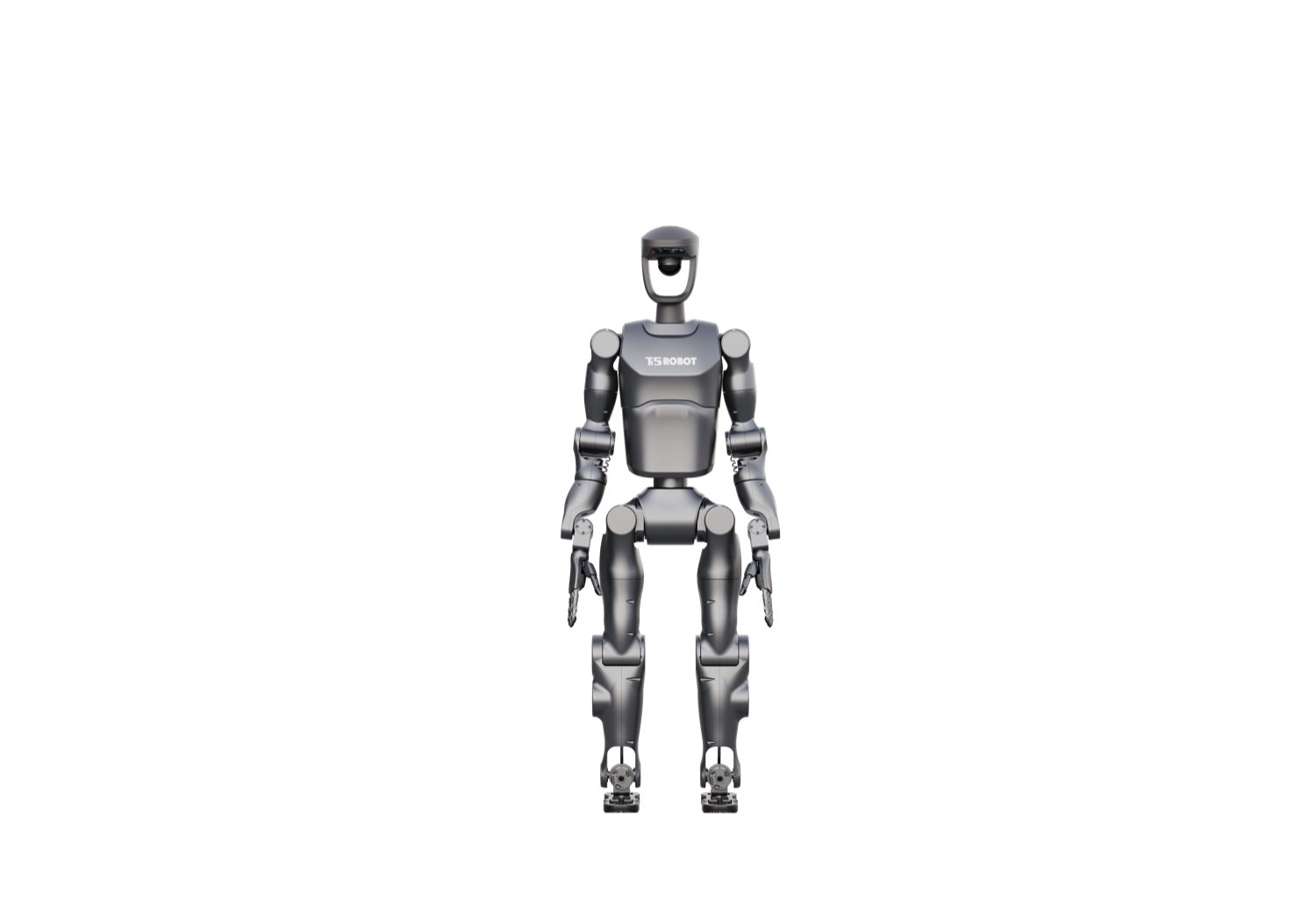
Humanoid Robot
T170A 人形机器人
适合展示、研发、服务和复杂动作验证。强调高算力控制器、双目视觉、远距激光雷达和高扭矩腿部关节。
- 高度/重量
- 170cm / 约50kg
- 自由度
- 44 DOF
- 算力
- Jetson AGX Orin 64GB
- 负载
- 单手 5kg
Compact Humanoid
T140 人形机器人
更轻量的人形平台,适合教育研发、互动展示和空间受限的服务场景。支持双目视觉和 7 自由度手臂。
- 高度/重量
- 140cm / 约38kg
- 自由度
- 42 DOF
- 算力
- Jetson AGX Orin 64GB
- 负载
- 单手 2kg
Wheeled Bipedal
TITA 轮式双足机器人
适合巡检、运输、数据采集、扫描建图和二次开发。兼顾轮式速度、腿式适应性、开放接口和模块化扩展。
- 尺寸
- 510 x 590 x 490mm
- 速度/载荷
- 3m/s / 移动 10kg
- 算力/API
- 100 TOPS / ROS 2
- 续航
- 双电池,约1h/电池
Modular Wheeled-Legged
D1 模块化轮足机器人
世界首款支持整机模块化的轮足式机器人,可在轮足、足式、双机拼接等构型间延展,面向复杂场景的移动载体和科研平台。
- 尺寸
- 750 x 493 x 643mm
- 重量/自由度
- 48.5kg / 16 DOF
- 处理器
- Jetson Orin NX 8GB
- 续航/速度
- 四轮足约2h / 3.2m/s
选型提示
如果客户重点是人形展示、交互和双臂动作,优先看 T170A/T140;如果重点是户外巡检、移动运输、建图和开放开发,优先看 TITA;如果重点是多机拼接、强负载和模块化科研平台,优先看 D1。最终方案仍需确认载荷、地形、续航、传感器、控制接口和预算。
模块化轮足平台
D1:支持闪拼与多构型协作的具身智能移动平台
D1 结合轮式机器人的敏捷性和足式机器人的地形适应性,支持轮足-轮足、足式-足式、轮足-足式等联合拼接协作。模块化结构与开放接口可搭载视觉模块、通信模块、AI 主机、边缘处理器和多类传感器。
≤5s双机闪拼
≥25km双轮足空载续航距离
≥100kg匍匐姿态带负载能力
Ubuntu 22.04 / ROS 2二次开发支持

新增产品线
TITA:面向巡检、运输和研发的轮式双足平台
TITA 采用准直驱关节与轮毂驱动,支持两轮自平衡、轮式双足、双足、四足和轮式四足等构型方向。可接入视觉、通信、AI 主机、边缘计算和多类传感器,用于智慧园区、矿区、变电站、核电站和复杂工业环境。
Jetson Orin NX 16GB计算平台
100 TOPSAI 算力
43.2V正常电压
-10℃ ~ 45℃工作温度
解决方案
按应用场景匹配机器人与运动控制方案
Humanoid Robot Scenario
从整机平台到关节执行器,围绕真实应用确认方案
工厂、仓储、巡检和研发项目通常同时关注整机能力、关节模组可靠性、控制接口、样机测试和后续量产。我们会先拆解场景和关键参数,再判断适合采购整机、模组还是定制电机。
场景
推荐方向
关键确认
协作机械臂
关节模组、伺服驱动、编码器、末端工具
负载、臂展、重复定位精度、安全等级
AMR/AGV 移动机器人
轮边电机、驱动器、底盘控制、导航接口
载重、速度、坡度、续航、地面条件
电机开发及生产
BLDC/伺服/轮毂电机、关节执行器、电机驱动与测试方案
电压、扭矩、转速、占空比、尺寸、寿命、噪声、年用量
服务/巡检机器人
整机平台、云台、升降模组、低噪声电机
工作时间、噪声、外观、传感器集成
教育与研发平台
开发套件、小型伺服模组、控制板、SDK
开放接口、文档、预算、样机交期
巡检/运输机器人
TITA 轮式双足平台、传感器、边缘计算、ROS 2 接口
地形、坡度、载荷、续航、通信方式、二次开发需求
强负载/模块化平台
D1 模块化轮足机器人、拼接机构、感知模块、机械臂扩展
负载重量、拼接构型、楼梯/坡度、续航距离、开发接口
交付流程
从需求到样机,再到量产
需求澄清
确认应用、负载、速度、扭矩、空间、电源、控制方式、数量和目标成本。
方案选型
输出产品方向、关键风险、可报价项目和需要测试确认的参数。
样机测试
安排样品、图纸、数据表、视频测试或远程会议,验证性能边界。
批量导入
确认包装、检验、交期、售后和版本管理,降低量产沟通成本。
电机量产
围绕绕组、磁钢、轴承、动平衡、温升、噪声和出厂测试建立稳定生产流程。
服务能力
从选型到交付的项目支持
产品选型与方案评估
根据负载、速度、扭矩、电压、空间和成本目标,判断整机、电机或模组的合适方向。
电机与模组定制
支持 BLDC、伺服、轮边驱动、关节模组和控制接口的结构、电气与线束定制。
样机与测试支持
提供样品、图纸、参数表、测试视频和远程沟通,帮助客户确认性能边界。
机器人整机集成建议
围绕人形机器人、轮式双足、轮足平台和移动机器人项目,提供应用与配置建议。
报价与批量交付
清晰确认 MOQ、样品费、交期、定制项、包装、检验和量产版本管理。
中英文技术沟通
可面向国内外客户整理产品资料、参数说明、项目需求和售前技术回复。
项目询盘
把机器人需求发给我们,先判断可行方向
为了更快回复,请尽量提供应用场景、电压、扭矩或负载、速度、空间尺寸、控制方式、样品时间和预计数量。提交后需求会发送到业务邮箱,我们会按项目方向回复。
Shanghai TST Trading Co., Ltd